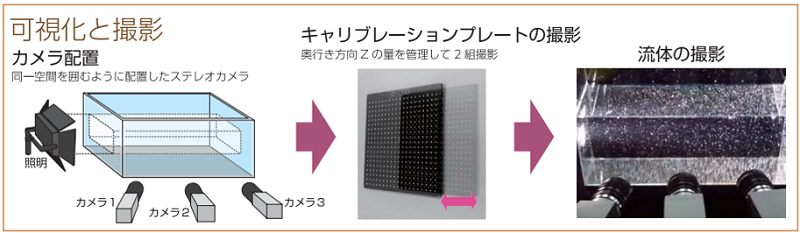
3次元空間に散布されたトレーサー粒子をトラッキングして
空間内の3次元ベクトルXYZを算出
同期撮影可能なステレオカメラで撮影します
Flownizer 3DPTVのお任せ機能
●粒子マスク相関法
粒子の抽出に面倒な画像処理のノウハウは不要です。
保有された仮想粒子像により、取得された画像内の小さな粒子や
暗い粒子なども自動で抽出します。
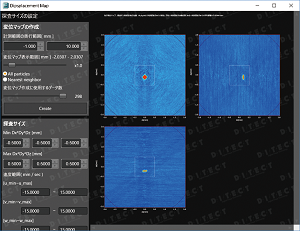
●変位マップ
すべての粒子のすべての時間における
変位のマップを高等線表示します。
これにより最適な探査範囲を設定することができます。
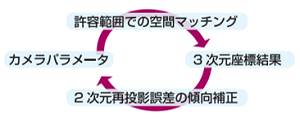
●ボリュームセルフキャリブレーション
得られた3次元結果を2次元画像上に再投影します。
再投影された結果と現実の粒子像の位置のズレから
誤差の傾向を導き、カメラパラメータを微調整します。
新しいカメラパラメータを用いて
再度空間マッチングを行い、3次元結果を算出します。
この繰り返しにより、誤差を順次縮小し、
極限まで計測誤差を低減します。
繰り返し回数などは、事前に設定しておけば、
すべて計算や処理はソフトウェアが自動で行います。
ソフトウェアの処理の流れ
![]()
①画像選択
対象動画と、キャリブレーション用画像の読み込み
カメラごとに整理して確認します
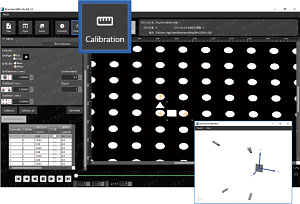
②カメラキャリブレーション
専用キャリブレーションプレートなら、
原点とX,Y方向のマーカをクリックするだけで、
ドット配置のすべてのマーカを自動で検出します。
完了すると、カメラ配置のガイド表示により、
キャリブレーションが成功したことが明瞭に判断できます。
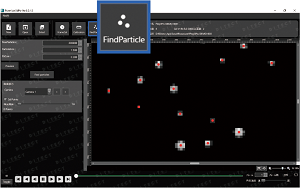
③粒子検出
キャリブレーションが終わると、
粒子検出のスイッチが有効になります。
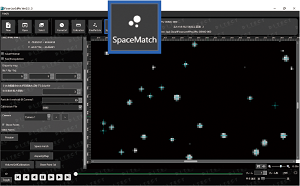
④空間マッチング
複数のカメラでとらえた粒子を
各カメラの映像をもとに対応付けします。
これにより粒子の各時刻での3次元位置が数値化されます。
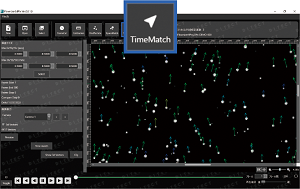
⑤時系列接続(ベクトル計算)
数値化された3次元座標群を、時間軸方向に接続して、
時刻間の移動量=流速を求めます。
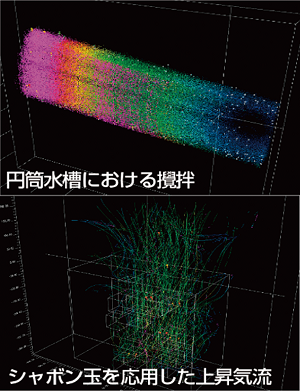
⑥結果の表示
速度分布の高等線表示、粒子の軌跡表示、
時間軸切断・空間切断による速度コンター表示
Flownizer 製品比較
| 2D3C | 3DPTV | |
| 計測対象空間 |
平面 レーザーシート光の厚さ分の空間 |
立体 |
| 検出ベクトル成分 | 3次元(X,Y,Z) | 3次元(X,Y,Z) |
|
計測手法 |
PIV | PTV |
| カメラ台数 | 2台 | 2台以上(3台以上推奨) |
|
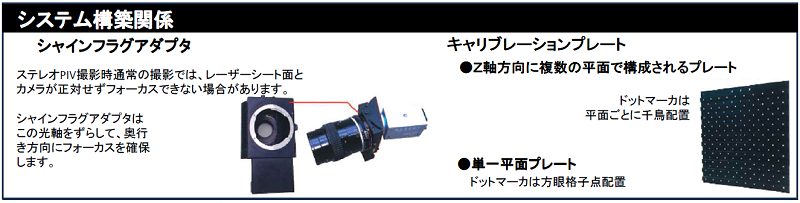
シャインフラグアダプタ |
使用を推奨 | 不使用 |
| キャリブレーション | 複数平面構成のプレート推奨 | プレートを指定量移動 |
システム構築例
| 2D3C | 3DPTV | ||
| 品名 | 数量 | 品名 | 数量 |
| ハイスピードカメラ | 2 | ハイスピードカメラ | 3 |
| レンズ | 2 | レンズ | 3 |
| シートレーザー | 1 | LED照明 | 1 |
|
Flownizer II 2D3C ソフトウェア |
1 |
Flownizer 3DPTV ソフトウェア |
1 |
| シャインフラグアダプタ | 2 | 専用キャリブレーションプレート | 1 |
| 専用キャリブレーションプレート | 1 |
専用キャリブレーションプレート 移動機構 |
1 |
主な仕様
| 2D3C | 3DPTV | |
| 対応画像フォーマット | 動画/AVI, WMV 連番静止画/BMP, JPG, TIFF, PNG | |
|
出力形式 |
CSVデータ、動画データ(AVI, WMV)、静止画(BMP, JPG) | |
| 成分別速度 | X,Y,Z | |
| 出力数値 |
相関係数、速度勾配テンソル、渦度、 乱流エネルギー、レイノルズ応力 |
平均流速 |
| 結果表示流線 | 流線、流脈線、流跡線 | - |
| グラフ表示 | 指定ポイント、ライン、エリア | - |
| 過誤ベクトル選択 |
輝度、相関係数、速度数値フィルタ、 速度角度フィルタ、速度上限下限 |
- |
| 対応OS | Windows 10(64ビット)、Windows 11(64ビット) | |
| CPU | インテル Corei5以上推奨 | |
| メモリ | 8GB以上のRAM(推奨16GB以上) | |
| ストレージ | 空き容量 100GB以上 | |
| モニタ | XGA以上の解像度(推奨1280x800以上) | SXGA以上の解像度 |





